
Feedback Design and Implementation for Integrated Posture Manipulation and Thrust Vectoring
Aniket Dhole
MS Thesis, Northeastern University
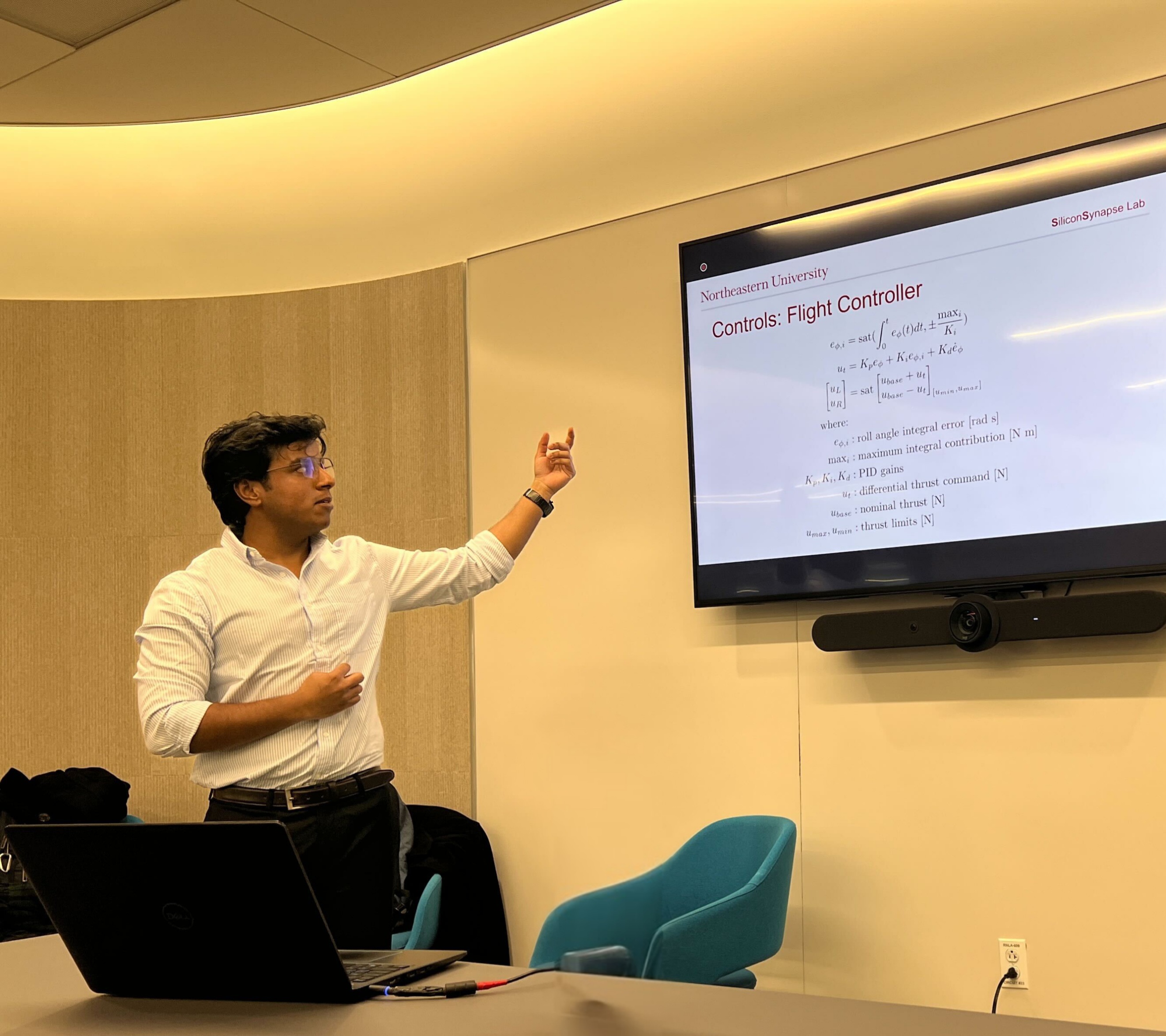
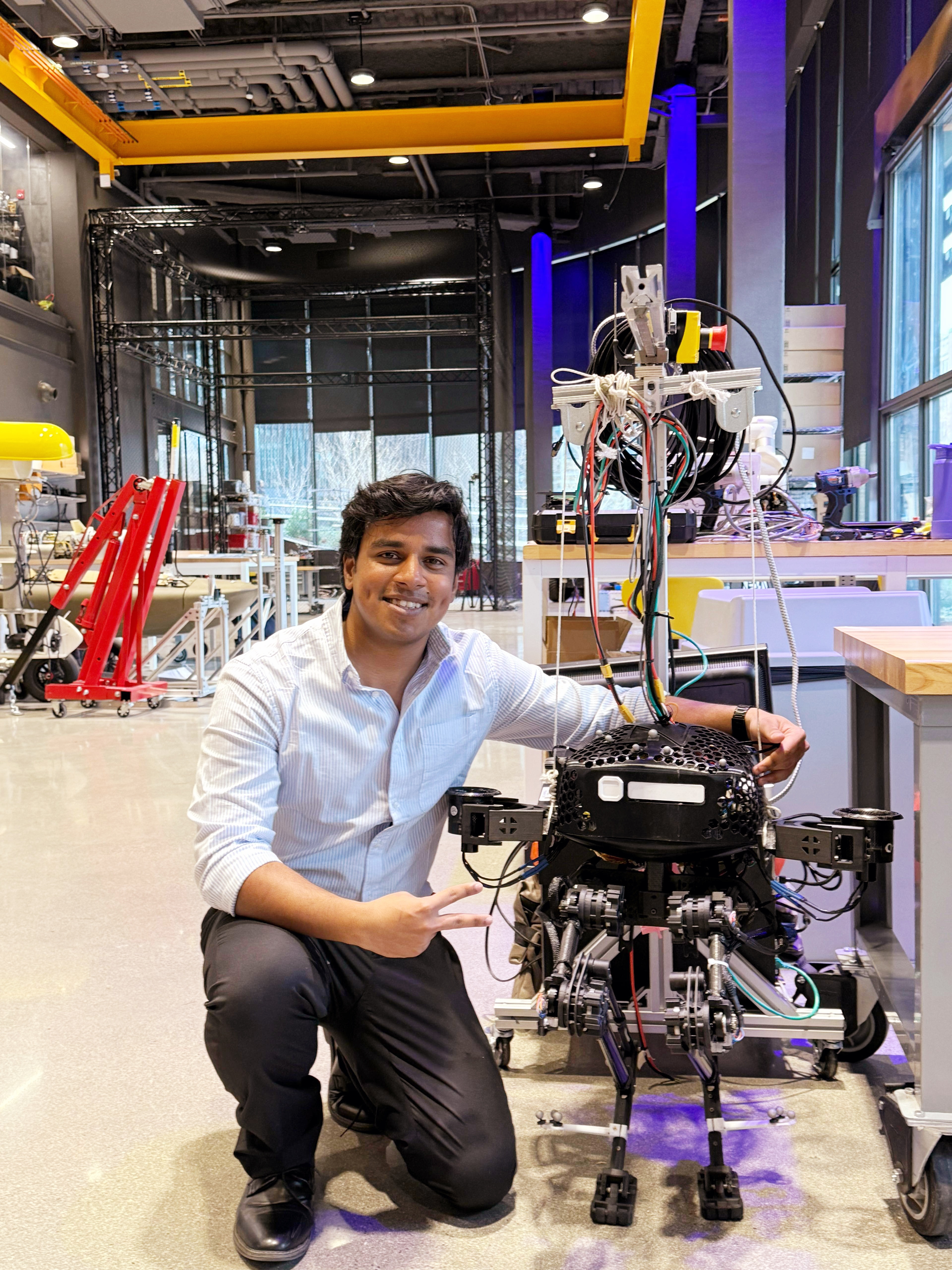
This MS thesis outlines my contributions to the closed loop control and system integration of two robotic platforms- 1) Aerobat, a flapping wing robot stabilized by air jets, and 2) Harpy, a bipedal robot equipped with dual thrusters. Both systems share a common theme of the integration of posture manipulation and thrust vectoring to achieve stability and controlled movement. For Aerobat, I developed the software and control architecture that enabled its first untethered flights. The control system combines flapping wing dynamics with multiple air jet stabilization to maintain roll, pitch and yaw stability. These results were published in the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). For Harpy, I implemented a closed-loop control framework that incorporates active thruster assisted frontal dynamics stabilization . My work led to preliminary untethered dynamic walking. This approach demonstrates how thrust assisted stability can enhance locomotion in legged robots which has not been explored before.